| Version
|
Date
|
BELK version
|
Notes
|
| 1.0.0
|
November 2015
|
3.0.0
|
First release
|
The following figure shows the developing environment for an Embedded Linux system based on BORA or BORAX: it is composed of a host machine and a target machine.
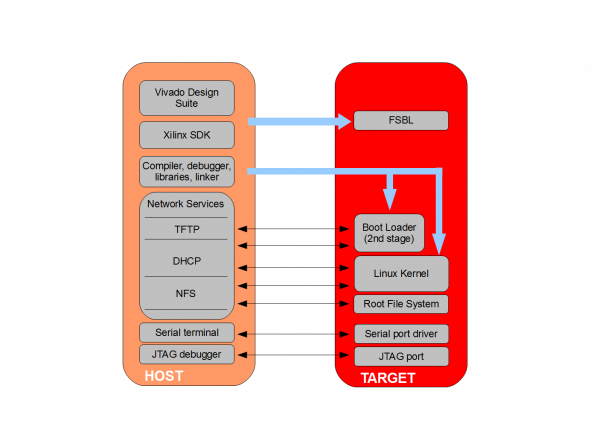
BORA/BORAX development environment
In a typical environment, the host is used by the developer to (cross-)compile the code that is to run on the target. In our case the target is a SOM, while the host is assumed to be a PC running the Linux operating system, either in a physical installation or as a virtual machine. The bootloader running on the target can download the Linux kernel image through the network (TFTP), as well as the u-boot binary images (useful when an update of the bootloader is required). Moreover, the Linux kernel running on the target is able to mount the root file system from different physical media, for example from a directory exported via Network File System (NFS) by the host. This strategy (kernel image and RFS retrieved from the network) saves time during the development phase, since no flash reprogramming or removable storage (SD, usb pen drives, external disks) is required to test new versions or updates of the software components. In contrast with a typical embedded system, BORA/BORAX adds some complexity, due to the nature of the Zynq processor, which provides both a CPU core (PS, processing system) and a integrated FPGA (PL, programmable logic). This means that additional tools are required to manage this complexity. In particular, the Vivado® Design Suite and the Xilinx Software Development Kit are required for the hardware level configuration and for building the first stage boot loader (FSBL).
